Simulation of Human Reaching with a Robot Arm
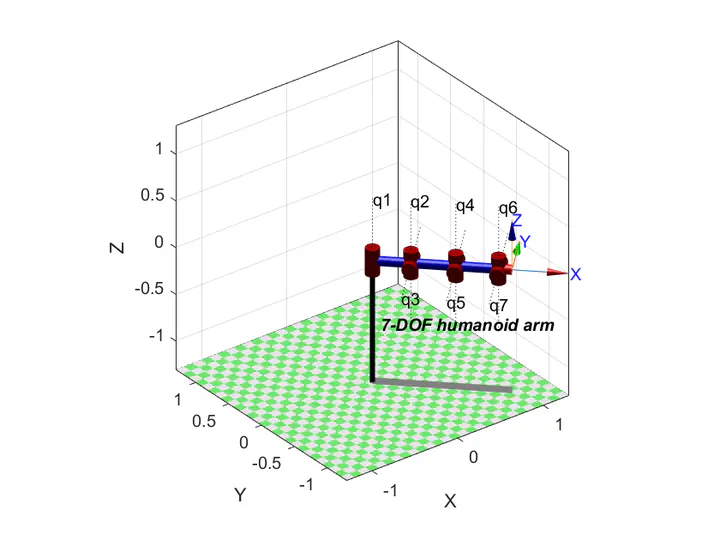
This research is a further exploration of the CoRLEGO model which used a LEGO planar robot arm to explain the movement patterns of the human arm in choice reaching tasks. In our work, we aimed to extend this model to reaches in 3D space using a human-like (7-Degrees of Freedom) robot arm. Different from previous projects, this project not only considers humanarms movement in single target scenarios but also reaches in environments with multiple potential targets. This extension is particularly important as current research has shown that human reaches are influenced by all objects in the environment, but not only the target. We use the Sigmoid function to implement the human attention shift process in scenarios with multiple potential targets. The Sigmoid function returns a value in the range of 0 to 1, so this characteristic is applied to simulate the trajectory profile of the human arm. Meanwhile, a quintic polynomial interpolation method is used to calculate the velocity profile of human reaches, which makes the profile of trajectories, velocity and acceleration continuous and smooth while planning the velocity of robot arms. Besides, we implement the movement of the robot arms through forward kinematics and inverse kinematics, which allow robot arms can calculate their pose at each moment. Furthermore, a gradient projection method was used to limit the motion of joints, aiming to model the structural limitations of the human arm. Meanwhile, the damped least squares method was used to help robot arms avoid the singularity. Together these steps allowed us to lay the foundations for a model of human 3D reaches in a choice reaching task.