Simulation of Human Reaching with a Robot Arm
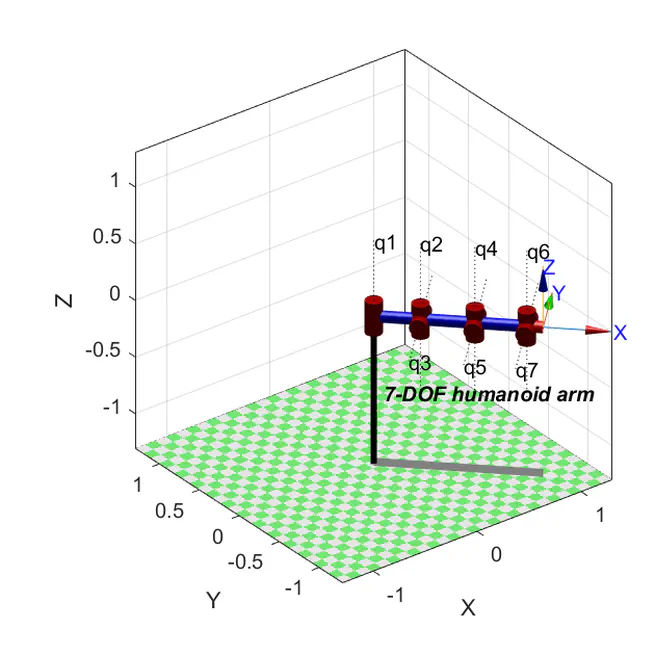
In this project, I used a human-like (7-Degrees of Freedom) robot arm to explain the movement patterns of the human arm in choice reaching tasks. This project was completed under the supervision of Dr. Dietmar Heinke & Dr. Masoumeh Iran Mansouri from the University of Birmingham.
Sep 19, 2023